
1. 概述
Master 7 提供七自由度主動力反饋,是目前用途比較廣泛的觸覺設備,具備旋轉感應和主動抓取功能。設備全重力補償和無漂移校準的結合,有助于提高用戶操作的舒適度和準確性。Master 7 七自由度力反饋主手設備廣泛適用于:
>醫療機器人和空間機器人
>微型和納米機器人
>遙控操作臺
>虛擬模擬
>訓練系統
>研究
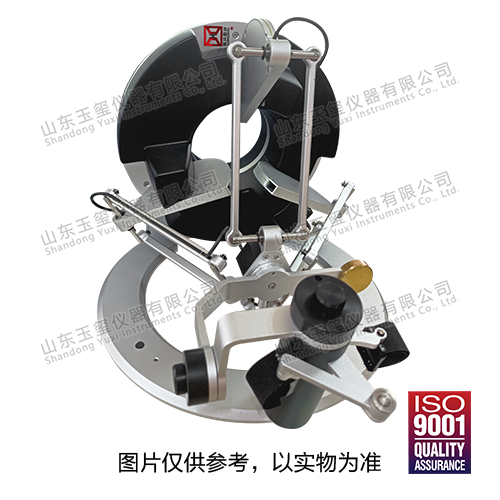
2. 結構
Master觸覺設備在精密機械結構的基礎上,將輕巧的鋁制金屬桿和牢固的傳動裝置完美地結合在一起。和觸覺設備常用的其它結構設計相比,該產品極大地減少了慣性效應。此外,Master采用的平行機械設計將整體結構的硬度和堅固性提升到一個超乎想象的水平,從而使其成為桌面應用程序中最為堅實耐用、牢固可靠的點接觸型觸覺設備。
Master 7的交互機構有7個自由度,可以看成是由精密并聯機構、腕關節機構及夾手機構3個部分串聯組成。
精密并聯機構:提供三自由度平移運動,用于采集操作手的移動位置。
腕關節機構:提供三自由度旋轉運動,其3個旋轉軸軸線交于一點,相鄰連桿轉軸相互垂直;用戶操作腕關節機構手柄,從而采集操作者腕部的轉動姿態。
夾手機構:提供一個自由度的旋轉夾取運動,用于采集用戶手指的夾取動作,夾手機構布置在腕關節末端構件上。
3. 主要參數
|
工作電壓 |
輸入:110V - 240V / 50HZ |
輸出:12V |
|
設備尺寸 |
h×w×d |
270×300×350mm |
|
設備重量 |
|
4.2 kg |
|
工作區 |
解析 |
Φ160×110mm |
|
自由度 |
控制距離 |
25mm |
|
|
|
240×140×320° |
|
力 |
解析力 |
12N |
|
|
控制力 |
±8.0N |
|
解析度 |
解析精度 |
<0.01mm |
|
|
轉動精度 |
0.09° |
|
|
控制精度 |
0.006mm |
|
剛度 |
閉環 |
14.5N / mm |
|
工作平臺 |
微軟 |
Windows |
|
|
Linux |
所有配置 |
|
|
Apple |
macOS |
|
|
Blackberry |
QNX |
|
軟件開發包 |
|
觸覺軟件庫 機器人軟件庫 |
|
結構 |
|
基于delta的并聯動力學結構 |
|
|
|
以手為中心的解耦旋轉 |
|
|
|
主動的重力補償 |
|
校準 |
|
自動校準/無漂移 |
|
用戶輸入 |
|
力反饋可編程按鈕 |
|
安全性 |
|
速率監控 電磁阻尼 |
|
可選擇 |
|
左手/右手 |
在線溝通,請點我在線咨詢
咨詢熱線:
0531-82687977
客服qq:
188031986
